A recent study led by Associate Professor Feng Yanggang from the School of Mechanical Engineering and Automation at Beihang University, in collaboration with the Massachusetts Institute of Technology (MIT) and Peking University Third Hospital, has been featured as a headline on the Nature homepage.
The research, published as an Accelerated Article Preview in Nature under the title "Spinal neuromotor rehabilitation using a portable isokinetic training robot," represents a paradigm shift in wearable robotic rehabilitation. Li Yuebing and Ren Jiaxin, graduate students at the School of Mechanical Engineering and Automation, along with Associate Professor Feng Yanggang, are co-first authors. Associate Professor Feng is the sole corresponding author, and the School of Mechanical Engineering and Automation at Beihang University is the primary affiliation for the research.

Addressing an Unmet Need in Neuromuscular Rehabilitation
Spinal muscular atrophy (SMA) is a common autosomal recessive disorder and a classified rare disease. Currently available drugs can only slow disease progression but cannot reverse its course. Most lower-extremity assistive robots are designed to actively assist gait, operating on the principle of reducing efferent muscle activation. For patients with SMA type II, who require increased efferent activation to maintain neuromuscular function, such an approach may hinder long-term neuromuscular development. Traditional resistance training devices (e.g., isokinetic dynamometers) are often bulky, expensive, and provide minimum resistance levels that are typically too high for pediatric SMA patients.
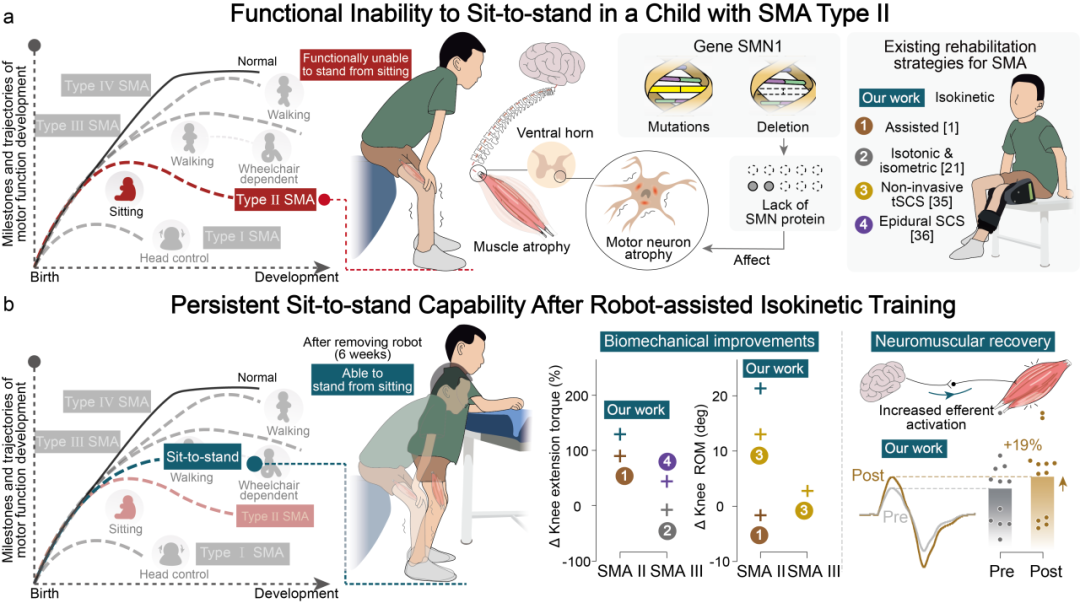
Figure 1. Principles of neuromotor rehabilitation using a portable isokinetic training robot
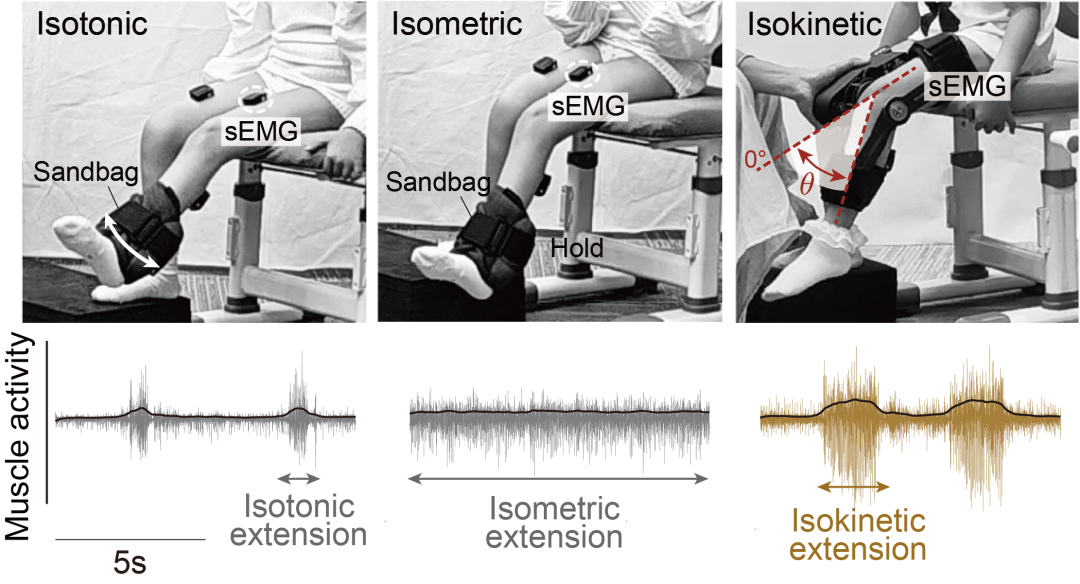
Figure 2. Comparison of muscle activities under isotonic, isometric, and isokinetic training modes
A Novel Lightweight, Portable Solution
In this study, the authors present a lightweight (0.96 kg) robot that administers isokinetic resistance training to sustain neuromuscular rehabilitation after removal. The device integrates a variable stiffness mechanism with a back-drivable damping motor to make available safe, portable, and customizable resistance training to juveniles with SMA type II.
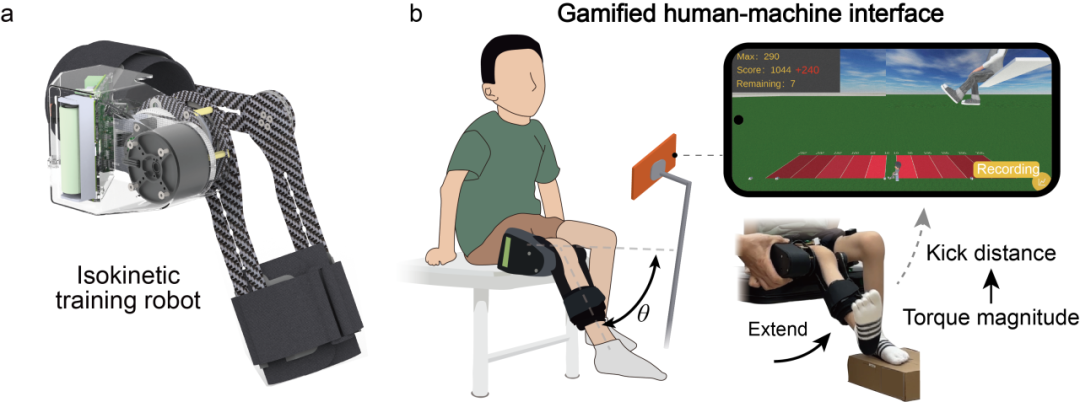
Figure 3. Portable isokinetic training robot and gamified human-machine interface
The team conducted a 5.5-month clinical trial (NCT06648486) involving six children with SMA type II, aged 6 to 10 years (three male, three female). The trial protocol included a 6-week observation period, 6 weeks of high-intensity isokinetic training, 6 weeks of low-intensity training, and a follow-up period exceeding 30 days. Participants gained the ability to perform sit-to-stand transitions with hands on knees but without external support from an average seated knee flexion angle of 111° to 104°, representing a 7° improvement from pre-intervention. This improvement was accompanied by significantly increased bilateral knee joint function (peak torque: +130%; range of motion: +51%; work: +97%). Significant physiological quadriceps muscle hypertrophy was observed (anatomical cross-sectional area: +12%; volume: +19%; physiological cross-sectional area: +21%) alongside enhanced femoral nerve conduction (compound muscle action potential: +19%), representing physiological changes consistent with the observed functional improvements.
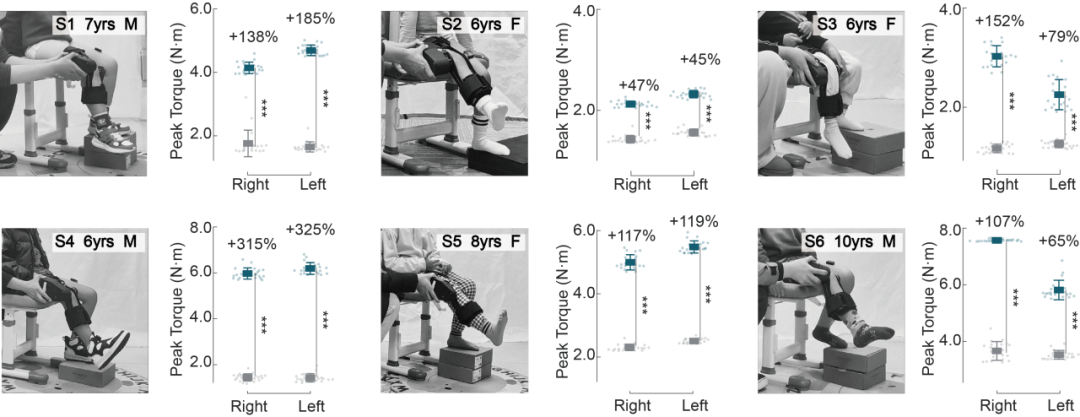
Figure 4. Changes in bilateral knee extension peak torque in six pediatric patients with SMA type II before and after training
Figure 5. Acquisition of sit-to-stand ability at different knee flexion angles in pediatric patients with SMA type II after isokinetic training
Sustained Benefits Even After Robot Removal
Most importantly, participants were able to retain their gains after discontinuing isokinetic training and returning to their conventional physiotherapy routines. These results suggest that even temporary exposure to isokinetic resistance training through wearable robotics may facilitate enduring neuromuscular recovery.
This finding represents a paradigm shift in wearable robotic rehabilitation. Rather than relying on external assistance for short-term recovery, the device reverses the conventional approach by actively increasing resistance during movement to unlock the body's latent potential. As a potent adjunct to pharmacotherapy, this training paradigm aims to induce sustained neuromuscular recovery, ultimately enabling patients to rely on their own physiological capacity to rebuild motor function and improve quality of life.
Link to the article: https://www.nature.com/articles/s41586-026-10642-0
Editor: Lyu Xingyun


 Beihang NewsFilm director still finds inspiration in digital eraMore
Beihang NewsFilm director still finds inspiration in digital eraMore Beihang NewsPresident Wang Yunpeng visits Chengdu and Xiamen to strengthen university-enterprise cooperationMore
Beihang NewsPresident Wang Yunpeng visits Chengdu and Xiamen to strengthen university-enterprise cooperationMore Beihang News3rd International Workshop on Key Issues of Manned and Deep Space Exploration heldMore
Beihang News3rd International Workshop on Key Issues of Manned and Deep Space Exploration heldMore Beihang NewsBeihang delegation visits France to deepen scientific and educational cooperationMore
Beihang NewsBeihang delegation visits France to deepen scientific and educational cooperationMore Beihang NewsBeihang badminton team claims championship at National University Badminton InvitationalMore
Beihang NewsBeihang badminton team claims championship at National University Badminton InvitationalMore