A research team led by Professor Xu Kun at Beihang University's Robotics Institute has developed China's first six wheel-legged hybrid robot for planetary exploration. The groundbreaking achievement was recently featured in a special report by China Central Television (CCTV) program Innovation in Progress.
Designed to navigate the complex and challenging surface environments of the Moon and Mars—characterized by dense craters and rocky terrains—the hexapod wheel-legged robot offers a range of advanced capabilities, including adaptive gait switching, seamless wheel-leg transitions, dual-purpose leg-arm functionality, superior obstacle negotiation, and substantial payload capacity. The robot is expected to become a vanguard for future human exploration of extraterrestrial surfaces.
In side-by-side comparison tests conducted on simulated extraterrestrial terrain, the six-legged robot demonstrated superior stability and load-bearing performance over quadruped designs. While a quadruped has only two legs on the ground at a time, making its body prone to wobbling, the hexapod maintains three points of contact with the ground at all times, ensuring a stable triangular support. Inspired by insects, the robot features an innovative circular body with six evenly distributed legs, allowing omni-directional movement with no distinction between front and back. Its payload capacity reaches 35 kilograms, more than twice that of a quadruped.
Equipped with an AI "brain," the robot can recognize surface conditions in real time and autonomously switch between specialized gaits. When navigating a passage narrower than its own body width, the robot activates a "kick gait" that retracts its legs to slim its profile. When confronted with an obstacle, it seamlessly shifts to a "swing gait" to step over. These capabilities allow the robot to adapt effortlessly to the challenging and varied landscapes encountered on planetary surfaces.
To address the speed limitation of pure legged locomotion (only 1.5 meters per second), the team introduced a breakthrough wheel-leg composite design by adding wheels to the knee joints, enabling free switching between walking and rolling modes. In 20-meter obstacle tests, the wheel-legged hybrid combined the stability of walking over rough terrain with the efficiency of rolling on smoother surfaces, significantly improving mission performance.
Beyond mobility, the robot also demonstrates dexterous manipulation. Each of its six legs can function as a manipulator arm, with nearly 360-degree rotation at the knee joints. Equipped with a binocular vision camera and AI perception system, it can identify objects by color and texture, estimate distance, and correct positioning errors to perform tasks such as precision cutting and autonomous fire suppression. By fitting different tools, the robot can handle explosive disposal, rescue missions, and heavy transport. It can be teleoperated for fine manipulation or execute tasks autonomously, and has already demonstrated its value in public security applications.
The team has also developed a four wheel-legged robot inspired by roller skating, which can switch between walking and rolling without additional motors. This version holds promise for emergency rescue, logistics, security patrols, and reconnaissance missions.
Beihang University has been a pioneer in robotics research since 1979, establishing its Robotics Institute in 1987 and producing China's first PhD in the field. In 2026, the university launched China's first undergraduate program in Embodied Intelligence, a strategic new interdisciplinary major integrating AI, robotics, computer engineering, and control systems. The program is supported by top-tier laboratories, high-end robotics platforms, and industry-academic integration initiatives, aiming to cultivate interdisciplinary engineering talent and entrepreneurs capable of driving innovation in the embodied intelligence era.
Source: CCTV.com
Editor: Lyu Xingyun


 Beihang NewsBeihang team develops China's first six wheel-legged robot for planetary explorationMore
Beihang NewsBeihang team develops China's first six wheel-legged robot for planetary explorationMore Beihang NewsBeihang hosts 11th International Cultural FestivalMore
Beihang NewsBeihang hosts 11th International Cultural FestivalMore Beihang NewsQuatuor Agate presents world-class string performance at BeihangMore
Beihang NewsQuatuor Agate presents world-class string performance at BeihangMore Beihang News36th "Fengru Cup" Competition Exhibition and High School Student Technology Exploration Open Day heldMore
Beihang News36th "Fengru Cup" Competition Exhibition and High School Student Technology Exploration Open Day heldMore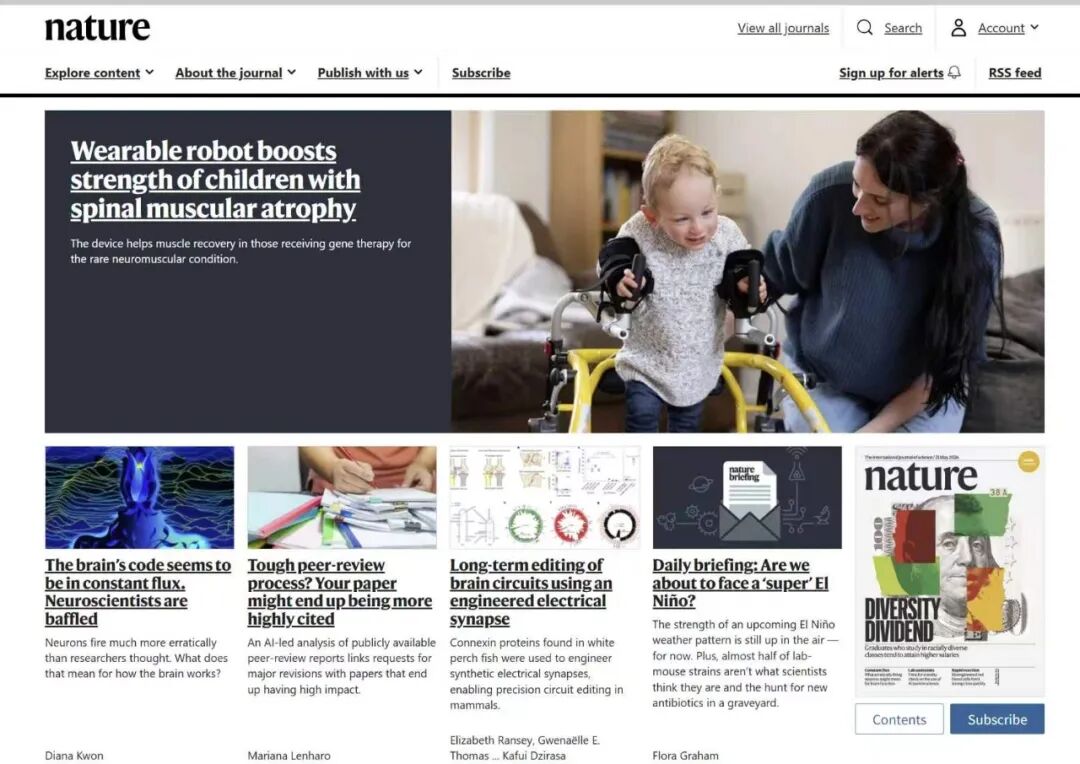 Beihang NewsNature homepage highlights Beihang University's latest breakthrough in wearable roboticsMore
Beihang NewsNature homepage highlights Beihang University's latest breakthrough in wearable roboticsMore Beihang NewsLa Traviata by China National Opera House staged at Beihang UniversityMore
Beihang NewsLa Traviata by China National Opera House staged at Beihang UniversityMore