Recently, Prof. Yan Xiaojun's team from the School of Energy and Power Engineering invented a micro-power system for insect-scale robots, and developed the BHMbot, Beihang Microrobot (2-cm-long, 1760 mg) with high untethered locomotion performance based on this system.
The research result was published online on May 8, 2024 under the title "A Wireless Controlled Robotic Insect with Ultrafast Untethered Running Speeds" in Nature Communications. Assistant Professor Liu Zhiwei and doctoral student Zhan Wencheng from Beihang University School of Energy and Power Engineering are co-first authors; Beihang Professor Yan Xiaojun and Tsinghua University School of Integrated Circuits Associate Professor Wu Xiaoming are co-corresponding authors; Beihang University is the most important contributing unit.
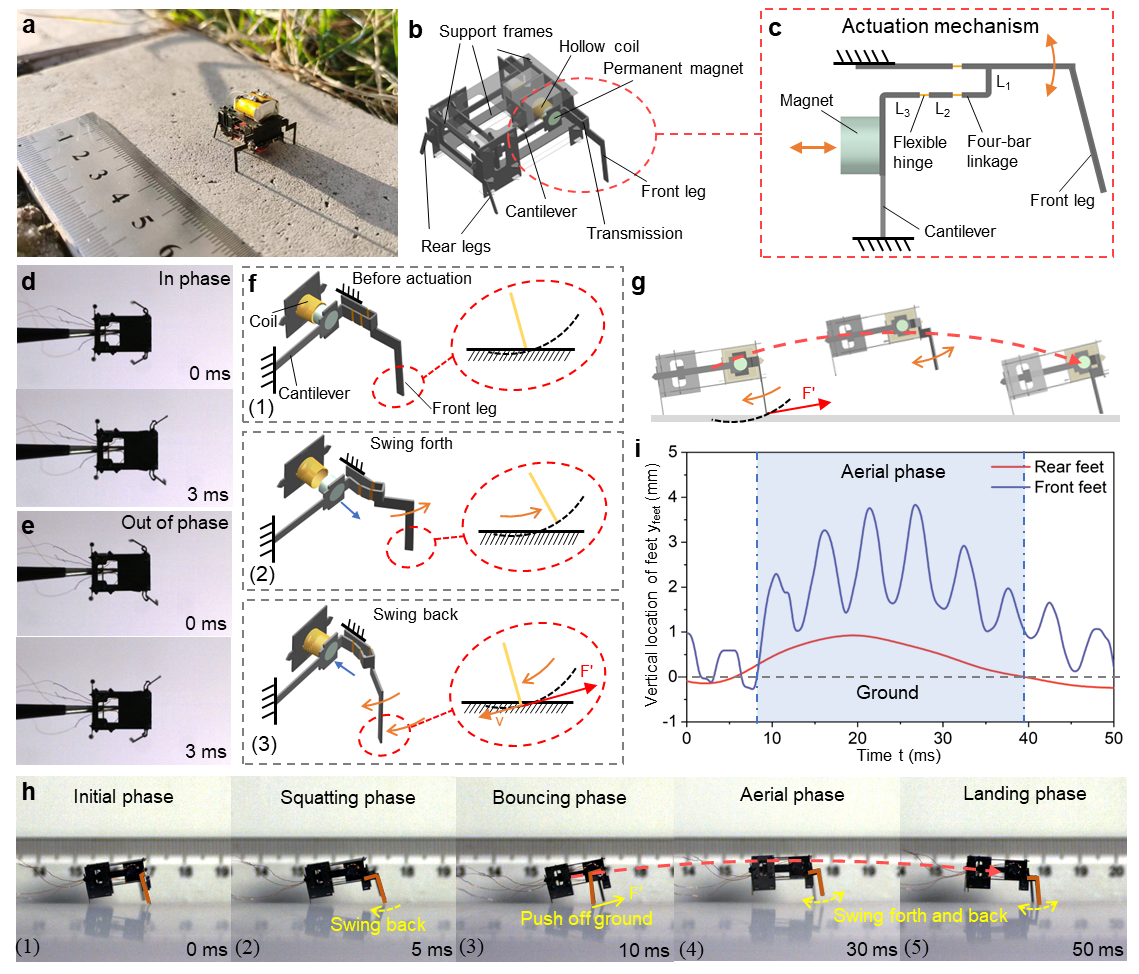
Fig. 1: Structural design and moving mechanism of the BHMbot
A variety of insect-scale legged microrobots have been proposed by roboticists and demonstrate satisfactory tethered locomotion performance using external power sources and control electronics. However, to this date, it remains a great challenge for the legged microrobot to maintain high speed after carrying essential components for untethered locomotion. Prof. Yan’s team well responds to this challenge in their work, overcoming three facets of difficulties including enhancing energy conversion efficiency of micro-power system, improving load-carrying capacity of robotic insect, and realizing accurate control of robotic insect.
In this study, they propose a 2-cm controllable legged microrobot with ultrafast untethered running speeds comparable to that of insects. The bouncing movement is achieved by the periodical impacts between the front legs and the ground using a developed actuation mechanism, and the high untethered mobility is attributed to the complementary combination of bouncing length and high bouncing frequency after carrying payloads. Key advancements of this work include: (i) realization of the running gait based on reciprocating swing motions of front legs with a developed actuation mechanism; (ii) an ultrafast untethered relative running speed at 17.5 BL s−1 and a turning centripetal acceleration at 65.4 BL s−2 under the dimension limitation of 2 cm; (iii) wireless control along complex trajectories including circles, rectangles, capital letters (BUAA) and irregular paths across obstacles using only two electromagnetic actuators; (iv) application scenarios demonstration of detecting distress signals by carrying a MEMS (Micro-Electro-Mechanical System) microphone, running inside a turbofan engine and collaborating with drones.
Video display of BHMbot on the move
Link to the article: https://doi.org/10.1038/s41467-024-47812-5
Reported by: Liu Yize
Reviewed by: Dong Zhuoning
Edited by: Jia Aiping, Lu Meili
Translated by: Lu Meili