Professor Xiang Jinwu, Professor Li Daochun, and Postdoctoral Fellow Ge Jiahao from the School of Aeronautic Science and Engineering published their latest research results in Acta Aeronautica Et Astronautica Sinica, titled “Prediction of non-stationary chaotic time series with noise based on combinational NARX neural network.” Ge Jiahao is the first and corresponding author of the paper.
In response to the complex evolution of chaotic time series, as well as the serious impact of non-stationary features and noise on the short-term prediction accuracy of chaotic time series, the researchers propose an online combination prediction method of Non-stationary Noisy Chaotic Time Series (NNCTS) based on Forward Difference, Improved Wavelet Packet Denoising, and Nonlinear Auto-Regressive with eXogeneous inputs network (FD-IWPD-NARX).
In the framework of moving horizons, the forward difference is used to the stabilize time series data in each window. The wavelet packet denoising threshold function is improved to enhance the data denoising effect. The stabilized denoised chaotic time series is then trained and tested using a series parallel closed-loop NARX neural network. The results show that the forward difference and the proposed improved wavelet packet denoising can effectively improve the predictive performance of the NARX neural network. Compared with the windowless NARX neural network, Recurrent Neural Network (RNN), and standard Long and Short-Term Memory network (LSTM), the FD-IWPD-NARX network proposed can complete model training based on a smaller amount of data, having advantages in prediction accuracy. The average model training time in each window is shortened to 0.12 seconds, which has the potential for online application.
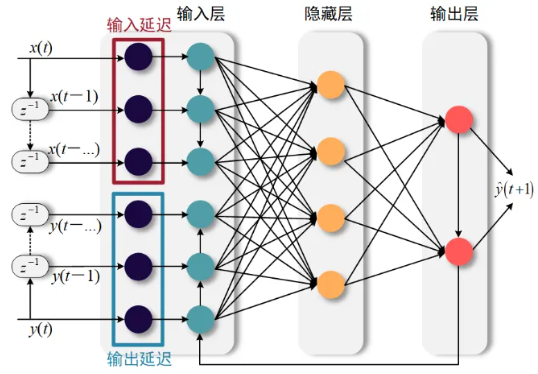
The structure diagram of NARX neural network

Tilt tri-rotor UAV platform
Editor: Lyu Xingyun