The role of median fins in linear acceleration was one of the least explored issues in fish locomotor behaviors, but researchers from Beihang University and Harvard University have taken the first step in providing a quantified answer. In a study published online in the leading robotic academic journal Soft Robotics on April 10, the team led by Prof. Wen Li from the Biomechanics and Soft Robotics lab and the School of Mechanical Engineering and Automation used an undulatory robotic fish with soft fluidic elastomer actuated morphing median fins to mimic live fish, and they measured an increase in swim speed and a reduction in side forces as the median fins erected up. Dr. Valentina Di Sato and Prof. George Lauder from Harvard University conducted the live fish experiments and analysis. Graduate students Ren Ziyu (now a PhD student at Max Planck Institute, Germany), and Hu Kainan, Yuan Tao from Beihang University performed the design, fabrication and testing of the soft robotic fish model.
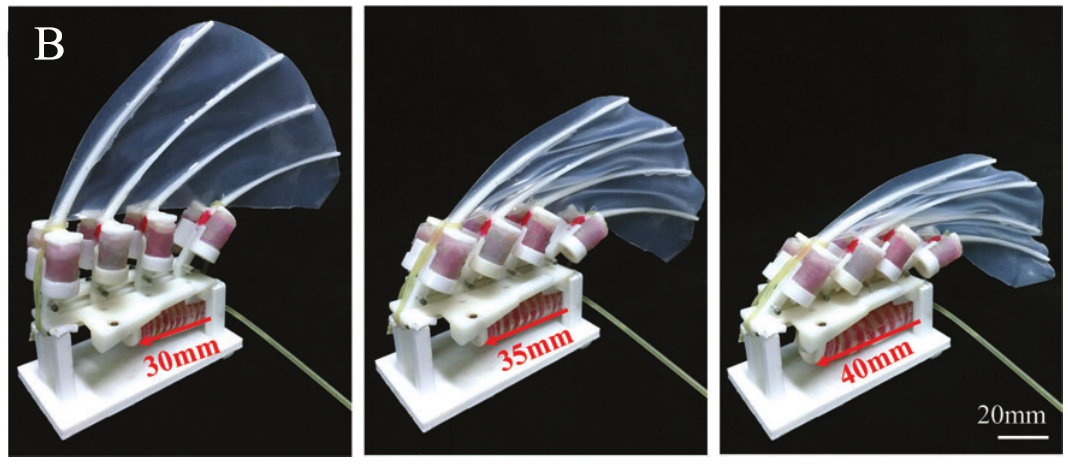
Fig. 1 (A) The biomimetic robotic fish with median fins fabricated by the soft robotics lab (video). (B) The biomimetic soft dorsal fin at fully-erected (pneumatic pressure: 0 Kpa), half-erected (153 Kpa) and fully-fold-down (278 Kpa) states.
Based on the data of live fish provided by their Harvard collaborators, researchers from Beihang University made full use of their rich experiences in underwater soft robotics and fabricated spiny dorsal, soft dorsal, and soft anal fins by multimaterial three-dimensional (3D) printing. The median fins were able to erect, fold and undulate from side to side (spiny ones can only erect and fold) using air-powered micro fluidic elastomeric soft actuators that imitate the corresponding erector/depressor muscles of live fish, as shown in Fig. 1(B). They were programmed to move according to five typical median fin motion patterns observed in bony fishes during swimming: all fins folded, spiny fin erected, soft fins half-erected, soft fins erected and all fins erected.The fins were fixed to an undulatory fish robotic model, which was connected to a towing system by a low-drag streamlined strut in head and a multi-axis ATI force transducer. During the experiments conducted at mid-depth in a tank, the model was first towed to reach a self-propelled speed as the thrust and drag force struck a balance over a single tail beat cycle. Next, the robotic fish model accelerated from initial zero velocity, and the mean axial forces at different rates of acceleration were calculated during the acceleration stage. A digital particle image velocimetry (DPIV) system, including the laser system, high-speed camera and particles, was adopted to visualize and measure the flow field.
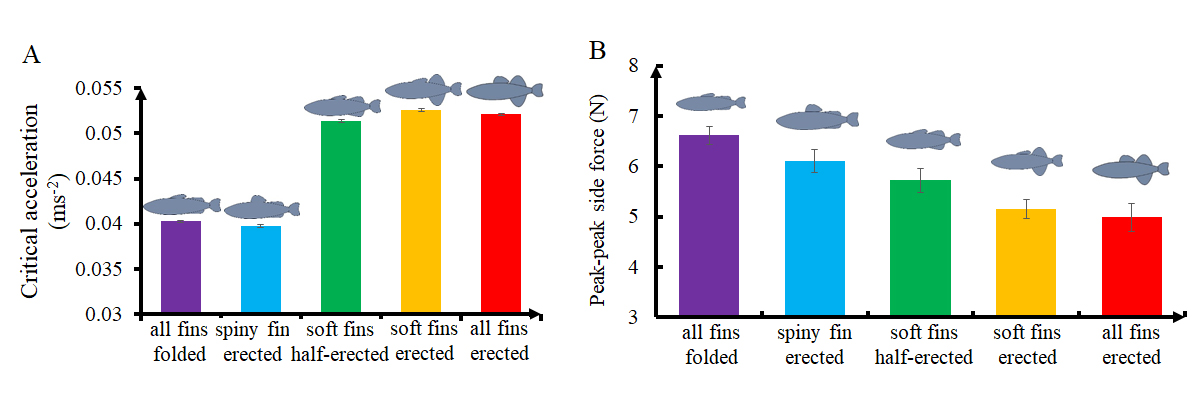
Fig. 2 (A)Critical linear acceleration of the biorobotic fish under different median fin states. (B) The average peak-to-peak side forces on the biorobotic fish under different median fin states.
The experiment results show that the soft dorsal and anal fins enhanced both the linear acceleration and the steady swimming speed. Compared with folded fins, fully erected soft fins could produce at most a 32.5% increase in the linear acceleration of the robotic fish (Fig. 2(A)). Also, when the soft dorsal and anal fins were fully erected, the self-propelled swimming speed (Usps) increased by 3.04% over that of the folded fin state, and the maximum increase in Usps (7.29%) was measured when the soft fins were half-erected. In both cases, erected spiny dorsal fins exerted little influence.
Apart from the speed, there was a probably counterintuitive discovery: erecting the soft dorsal and anal fins could reduce up to 24.8% of the magnitude of the side force on the robotic swimmer (Fig. 2 (B)). A further analysis of the wake flows (Fig. 3) found that during both linear acceleration and steady swimming, the lateral force produced by the dorsal and anal fins counteracted the caudal fin force, because the motion of these two groups of fins was largely out of phase and the two forces were oriented to opposite sides. The effect of the oscillatory forces produced by the tail was reduced by the dorsal and anal fin forces, and the fish was able to maintain its lateral stability better.
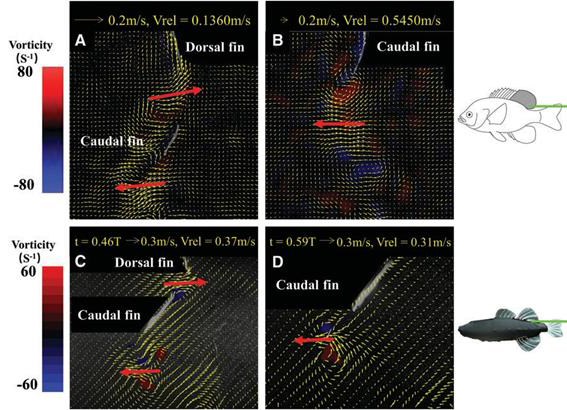
Fig. 3 Wake flows generated by the soft dorsal fin and caudal fin of a bluegill sunfish (A and B) and the robotic fish (C and D) during the linear acceleration.
The lightweight and compliant biomimetic dorsal/anal fins could resist fluid loading and quickly recover from external impacts in both the lateral and axial directions without damage, so the application of them to underwater robots was expected to improve the robots’ swimming performance in the complicated water environment. The researchers also planned to equip these highly adaptive fins with sensors that could help the fins sense the wake flow and then change their motion in response to external interferences, building them into an intelligent closed-loop system.
According to the study, morphological features of the biomimetic fin components, such as the size, shape, and mechanical stiffness, as well as the fin positions on the fish body, could be changed according to different research needs. Therefore, the modular and modifiable biorobotic system used in this study holds great potential as a scientific tool to further examine the locomotor functions of the diverse fin morphologies, kinematic patterns and sensory feedback control of the complex and multifactorial swimming behaviors in live fishes.
For more information:
The research article:
https://www.liebertpub.com/doi/10.1089/soro.2017.0085
Biomechanics and Soft Robotics Lab:
http://softrobotics.buaa.edu.cn/home/index.htm
Reported by Tan Lisha, Li Mingzhu and Xiong Ting
Written by Li Mingzhu
Designed by Yang Zhihan
Reviewed and Released by GEOOS
Special Thanks to the School of Mechanical Engineering and Automation and Biomechanics and Soft Robotics Lab
Please send contributions to geoos@buaa.edu.cn