Well-known scientific media coverage of this research work
Introduction
While the adhesion mechanisms in terrestrial species like geckos and tree frogs have been well studied, they are of limited use underwater. Attachment in marine environment requires new inspiration. A recent study published in Science Robotics presented a solution coming from remoras, whose ray-finned dish shows a unique and remarkable adhesive capability. Researchers from Beihang University, Harvard University, and Boston College investigated the morphology and kinematics of remora sharksucker’s adhesive disc and developed the first biomimetic remora disc, which is promising in applications such as underwater adhesion and grasping.
3 Key Approaches to the Robotic Remora Disc
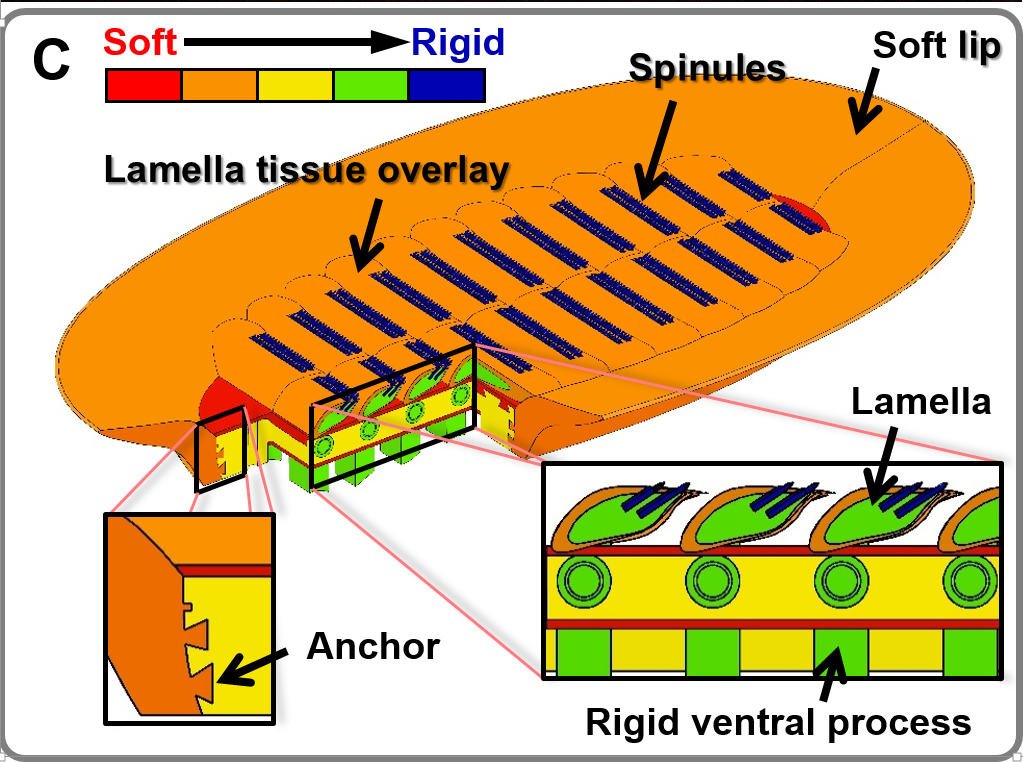
A remora relies on its head’s dorsal fin that forms an adhesive disc to attach to other marine animals, or “hitchhike”. As the research team found out with ESEM, Micro CT and high-speed videography, this ability is mainly attributed to three parts: a soft disc lip at the periphery, lamellae in the disc interior and rows of spinules on them.
To reproduce this structure, the researchers tackled three major difficulties, and the first one was the transition in the stiffness of the materials used in the prototype (except the spinules).
“If we simply combine soft materials with rigid ones, the structure will soon suffer from fatigue and break rapidly under high stress underwater,” said Dr. Li Wen, an associate professor at the School of Mechanical Engineering and Automation and the principal investigator of Biomechanics and Soft Robotics Lab of International Research Institute for Multidisciplinary Science, Beihang University.
Referring to the musculoskeletal linkages in several vertebrates, he and his fellows improved the design over and over again for almost a year. Finally, they developed a multi-material 3D printing technology that enabled them to achieve stiffness spanning three orders of magnitudes in a single printing.

A 3D printing diagram illustrating the transition in the stiffness of different components
What confronted them next was the fabrication of the spinules, whose precision and rigidity requirements could not be met by 3D printing. Here Dr. Wen worked with Harvard’s Wyss Institute for Biologically Inspired Engineering, which helped fabricating the spinules with a high resolution micro laser machine. These carbon fiber spinules highly resembled those of remoras in size and shape, and over one thousands of these spinules were firmly inserted into the lamellae.
The final major issue lay in the actuator, for traditional ones are not fit for powering the tiny structures. Therefore, the research team customized lightweight, fiber-reinforced, compliant soft pneumatic actuators for the disc. With three pairs of such actuators working in sequence, the prototype could intimate remoras’ lamella movement during their attachment behavior.
When Dr. Wen first noticed remoras in 2013, he was conducting post-doctoral research on the biomimetic shark skin at Harvard University. Looking at pictures of sharks, he found that they always appeared with some little creatures, which were then proved to be remoras and impressed him with their adhesion ability.

A remora attaching to a shark
"I searched about the adhesion mechanism and biomimetic application of them online, and basically found nothing," said Wen.
Li Wen started the research in his lab immediately after he returned to Beihang University, and the first achievement turned out to be a four-year work that involved many trials and improvements, multiple disciplines and several participants from China and America. The first authors (equally contributors) are Yueping Wang, a graduate student of the Beihang soft robotics lab, Xingbang Yang, an alumnus of the lab and now a postdoc fellow at MIT, Yufeng Chen, a postdoc fellow at Harvard Microrobotics lab. Other Beihang professors and graduates and American researchers also contributed to this work to a great extent.
On September 21st, 2017, the research article was published in Science Robotics and chosen for its cover, which was the first Chinese publication in this journal and a major progress in biomimetic study of remoras.
Like Dr. Wen's previous work, the biomimetic shark skin and the biorobotic octopus tentacle, this robotic remora disc also shed great light on nature-inspired design. In this study, the prototype could generate considerable pull-off force (up to 340 times the weight of itself) and attach to different surfaces, and the researchers have already developed an underwater robotic hitchhiker with it. Since it can save the energy for moving around by hitchhiking and does not damage the surface it attaches to, it could be applied to various fields, such as defense technology, underwater rescue and marine ecological monitoring, etc.

A robot prototype using the biomimetic remora disc
More information:
The research article:
http://robotics.sciencemag.org/content/2/10/eaan8072
News from Science/AAAS multimedia
http://www.sciencemag.org/news/2017/09/robotic-remora-can-cling-objects-force-340-times-its-own-weight
Coverage by MIT Technology Review:
https://www.technologyreview.com/the-download/608916/scientists-have-built-a-shark-sucking-robot-that-is-hideous-and-cool/
Biomechanics and Soft Robotics Lab
http://softrobotics.buaa.edu.cn/home/index.htm
Planned by Jiahui Cao
Interview by Lisha Tan, Jiahui Cao and Mingzhu Li
Designed by Tianmei Ren
Technical Support by Jiahui Cao
Written by Mingzhu Li
Special Thanks to the School of Mechanical Engineering and Automation and Biomechanics and Soft Robotics Lab of International Research Institute for Multidisciplinary Science
Edited and Posted by GEOOS
Please send contributions to geoos@buaa.edu.cn