A significant breakthrough in robotics has been achieved by Che Jingyu, a second-year master’s student from the School of Energy and Power Engineering at Beihang University, under the guidance of Professor Qi Mingjing. Her research paper, titled "Arc-Heating Actuated Active-Morphing Insect Robots," has been published in the prestigious journal Nature Communications. The study introduces an innovative ultra-fast insect robot capable of active morphing and self-recovery, demonstrating exceptional adaptability and resilience in complex environments.

Inspiration from Nature and Innovative Design
Insect-scale robots have immense potential in fields such as exploration, rescue, and surveillance due to their ability to access areas that are otherwise unreachable by humans. However, replicating the agility and flexibility of natural insects has long been a challenge due to limitations in materials, manufacturing techniques, and actuation mechanisms.
The research team draws inspiration from nature, observing how insects like cockroaches and desert spiders alter their body shapes to adapt to their environments. This insight leads to the development of a robot with active shape-changing capabilities, enabling it to navigate complex terrains and respond to unforeseen circumstances effectively.
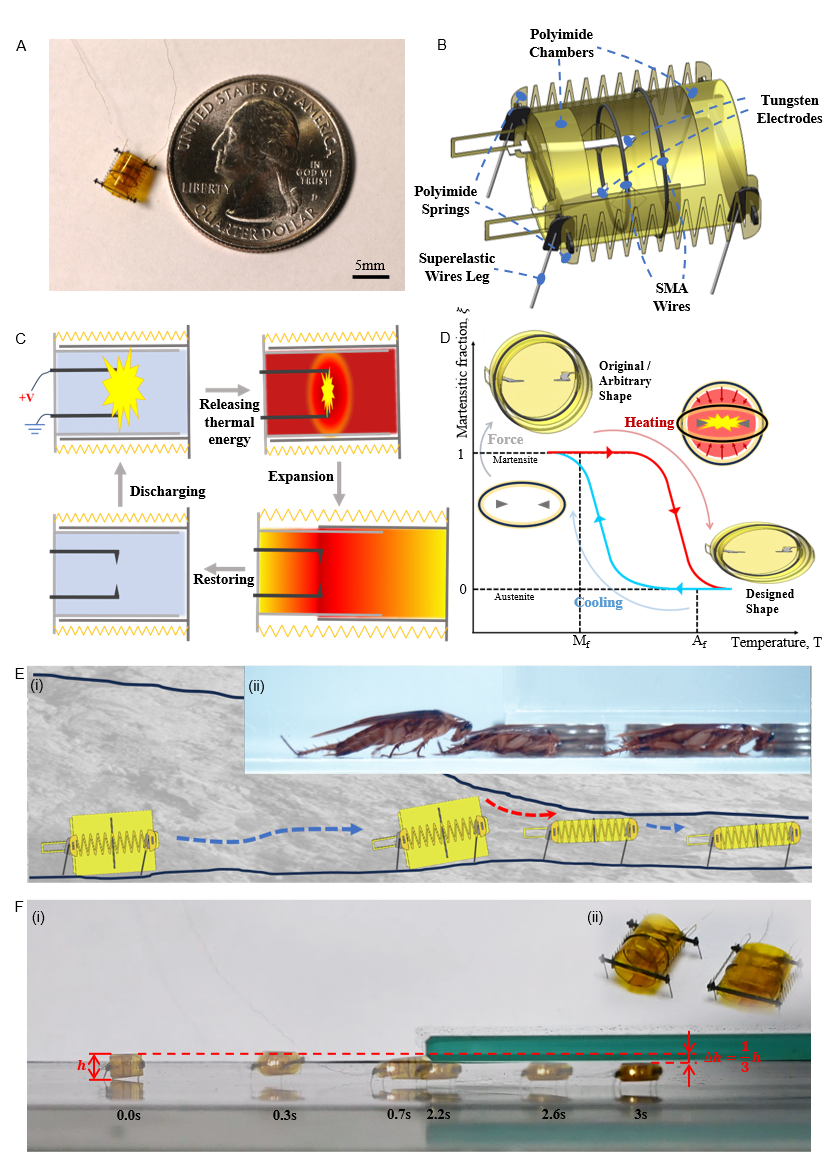
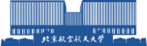
Fig. 1: An active-morphing robot utilizing an arc-heating actuator and NiTi SMA wires
Arc-Heating Actuation: A Revolutionary Approach
The research team, led by Professor Qi Mingjing, develops a novel actuation mechanism known as arc-heating. This mechanism employs a piston structure that generates an electric arc through a high-voltage discharge, rapidly heating and expanding the air within the chamber to propel the piston outward. A distinctive feature of this mechanism is its reliance solely on the pressure generated by the heated air for actuation, making the shape of the piston largely irrelevant to its performance. This unique characteristic provides the foundation for the robot’s ability to morph.
Furthermore, the arc-heating process generates temperatures of up to 300°C. The team ingeniously leverages this high temperature by integrating shape memory alloy (SMA) wires with the arc-heating actuator, creating a coupled mechanism for both morphing and actuation. When the actuator is activated, the high temperature causes the SMA wires to deform the actuator into a pre-set shape while simultaneously generating linear actuation force. This mechanism also allows the robot to quickly recover its original shape even after being deformed by external forces.
Fig. 2: Characterizations of arc discharge, vibration, and recovery in the AH actuator and robot
A Fast, Resilient, and Versatile Robot
Combining the arc-heating actuator and SMA wires, the research team successfully develops a fast insect-scale robot with a length of 5 mm and a weight of 10 mg. With a speed of 83.4 body lengths per second, it is one of the fastest-legged microrobots currently developed. Thanks to the coupling mechanism between actuation and morphing, the robot can actively change its shape to adapt to different environments. Moreover, the robot exhibits extraordinary resilience, enduring pressure 5 million times its weight (equivalent to an adult human stepping on it) and maintaining its speed after recovery.
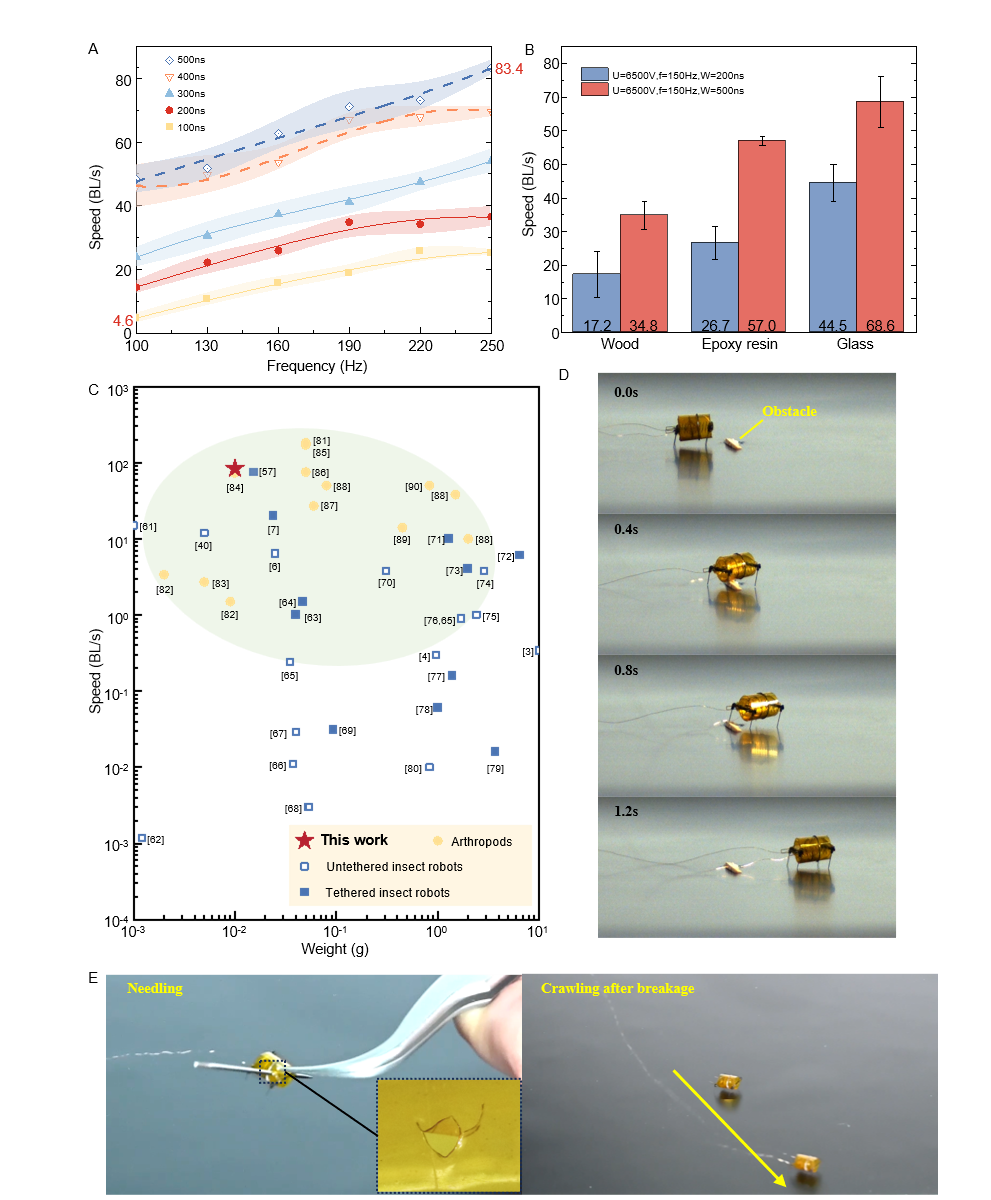
Fig. 3: Locomotion performance tests across various conditions and speed comparisons
The robot also exhibits various locomotor abilities, including obstacle-crossing, load-carrying, and moving on inclined surfaces. It can compress its body within 2.2 seconds to traverse narrow gaps such as door cracks or stone crevices and even possesses the ability to walk on water. Notably, the robot’s redundant actuation design ensures that it can maintain efficient mobility even after suffering puncture damage, highlighting its robustness and adaptability.
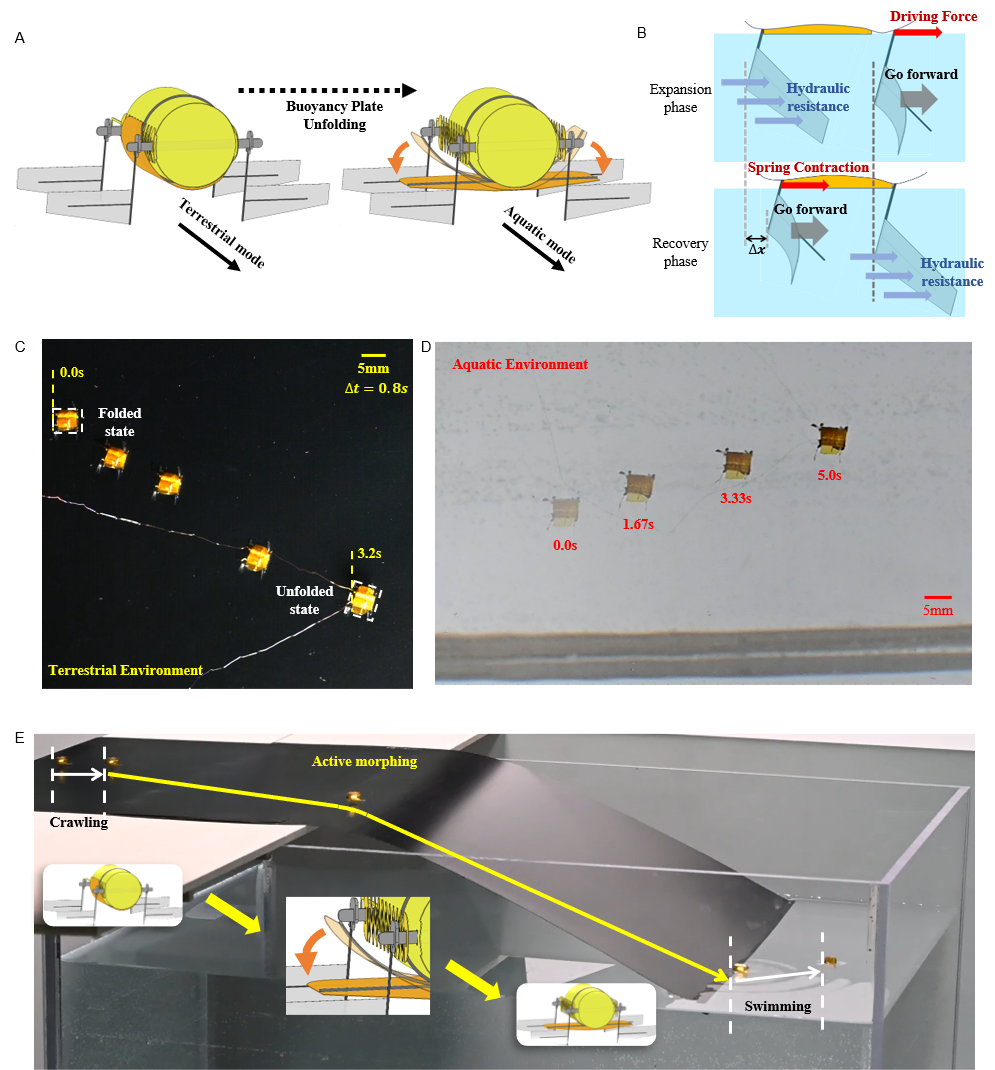
Fig. 4: Amphibious configurations for adaptation to aquatic and terrestrial environments
Future Applications and Potential
This innovative robot holds great promise for geological exploration and disaster relief applications. During routine storage or transportation, the robot can be flattened and stacked without requiring delicate protection, and when needed, it can swiftly regain its original form. In geological exploration, the robot can navigate narrow crevasses and proceed directly without circumventing aquatic environments. Additionally, by training the shape of the SMA wires, the robot can efficiently adapt to the shape requirements of other new scenarios.
Master student Che Jingyu, and Ph.D. student Yang Xiangyu are co-first authors of the paper, with Associate Professor Liu Zhiwei and Professor Qi Mingjing serving as co-corresponding authors. This work is supported by the National Natural Science Foundation of China.
Editor: Lyu Xingyun


 Beihang NewsBeihang holds 2026 Commencement and Degree Conferral CeremonyMore
Beihang NewsBeihang holds 2026 Commencement and Degree Conferral CeremonyMore Beihang NewsBeihang hosts 2026 Campus Open Day & Admissions Information Session across three campuses in Beijing and HangzhouMore
Beihang NewsBeihang hosts 2026 Campus Open Day & Admissions Information Session across three campuses in Beijing and HangzhouMore Beihang NewsBeihang University holds graduation gala for Class of 2026More
Beihang NewsBeihang University holds graduation gala for Class of 2026More Beihang NewsMETU President Ahmet Yozgatlıgil visits Beihang UniversityMore
Beihang NewsMETU President Ahmet Yozgatlıgil visits Beihang UniversityMore Beihang NewsUniversity leaders take group photos with 2026 graduatesMore
Beihang NewsUniversity leaders take group photos with 2026 graduatesMore Beihang NewsTrio Hélios Piano Concert staged at BeihangMore
Beihang NewsTrio Hélios Piano Concert staged at BeihangMore