A research team led by Professor Luo Sida from the School of Mechanical Engineering and Automation at Beihang University has developed a novel laser-programming technology that enables soft actuators to achieve freeform morphing capabilities, paving the way for next-generation bionic robots with unprecedented adaptability.
The paper, titled "Hierarchical laser-programmed soft actuators for designing bionic robots with freeform morphing shapes," was published in Science Advances and featured on the journal's homepage. Doctoral candidate Guo Yuhan and postdoctoral researcher Han Mingguang are co-first authors, with Professor Luo serving as the corresponding author. Beihang University is the primary affiliation for the research.
Traditional stimulus-responsive soft actuators have long faced a fundamental design trade-off between manufacturing simplicity and kinematic sophistication. To address this challenge, the research team introduces a spatially differentiated laser-programming technology for digital manufacturing laser-induced graphene-based soft actuators (LIG-SAs) with freeform morphing capabilities.
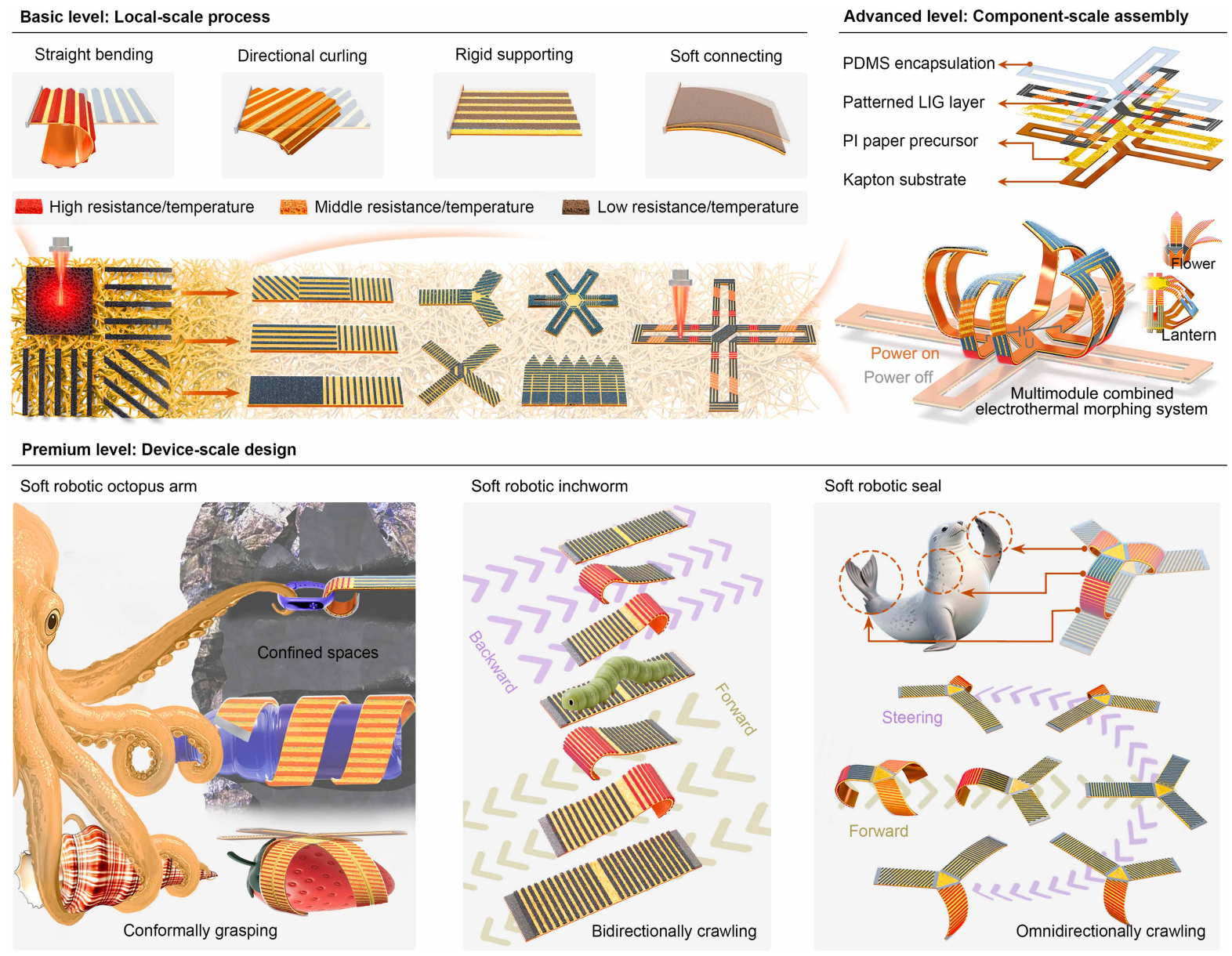
Fig. 1. Schematic illustration showing spatially differentiated laser manufacturing of LIG-SA with cross-leveled design for fabricating bioinspired soft robots with multimodal property control, configurable structures, and freeform morphing performance.
Via cross-scale control of lasing energy and scribing direction, material heterogeneity and structural hierarchy can be tuned simultaneously for introducing decoupled electrothermal distribution and stiffness anisotropy, thus encoding LIG-SAs with four typical motion units: straight bending, directional curling, rigid supporting, and soft connecting.
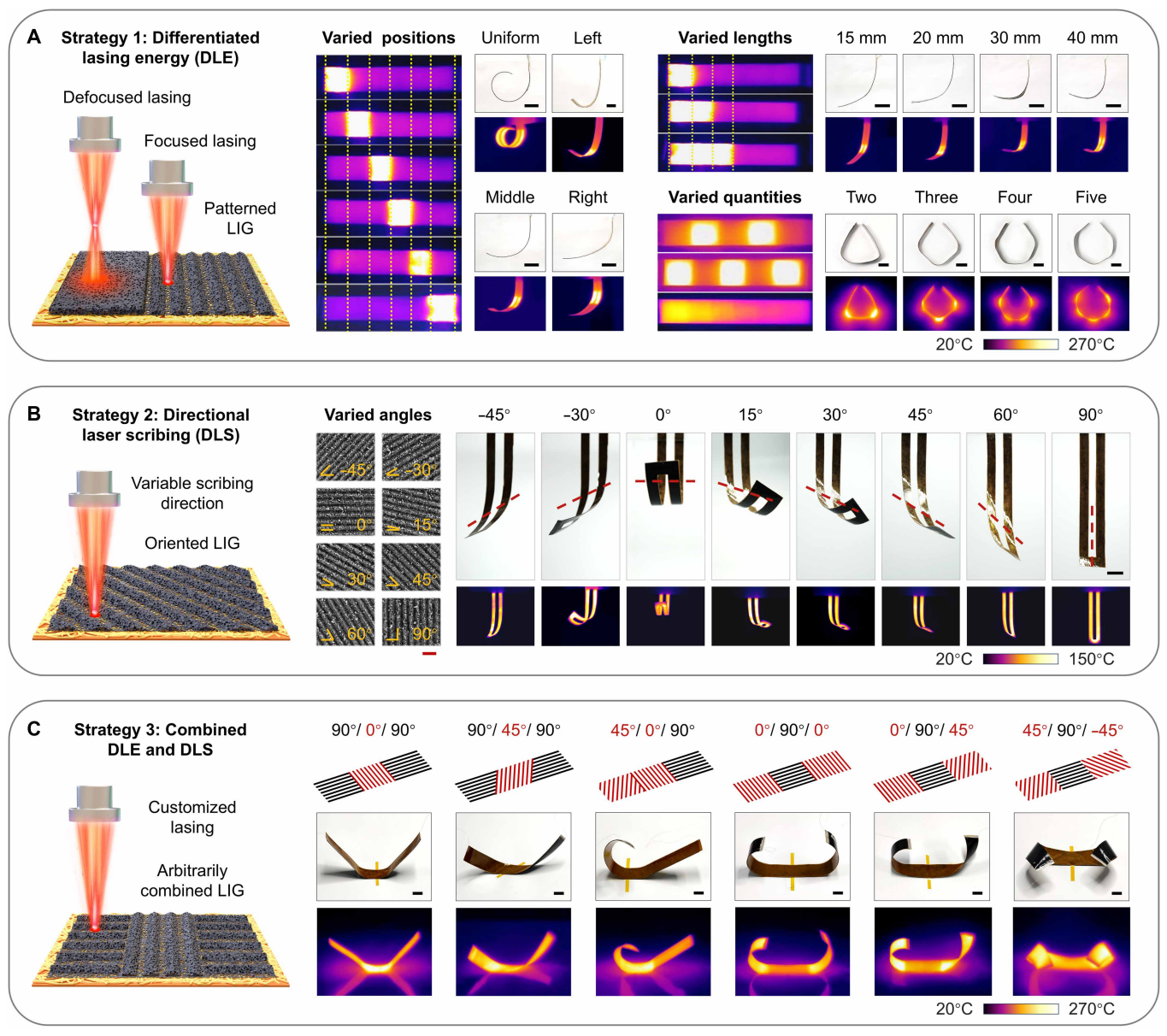
Fig. 2. Representative processing strategy for freeform morphing of LIG-SAs.
By arbitrarily grouping multimodal morphing units into concretized devices, the team successfully designed a range of bionic robots including octopus-like tentacles and inchworm/seal–like crawlers. These robots demonstrate multitask locomotion capabilities such as conformal grasping, path navigation, and obstacle avoidance.
This work bridges digital design with physical intelligence, unlocking previously unidentified avenues of soft robots for creating sophisticated and programmable morphologies. The research was supported by the National Natural Science Foundation of China, Beijing Natural Science Foundation, and China Postdoctoral Science Foundation under the Postdoctoral Innovative Talent Support Program and General Program.
Link to the article: https://www.science.org/doi/10.1126/sciadv.aeb1989
Editor: Lyu Xingyun


 Beihang NewsBeihang holds 2026 Commencement and Degree Conferral CeremonyMore
Beihang NewsBeihang holds 2026 Commencement and Degree Conferral CeremonyMore Beihang NewsBeihang hosts 2026 Campus Open Day & Admissions Information Session across three campuses in Beijing and HangzhouMore
Beihang NewsBeihang hosts 2026 Campus Open Day & Admissions Information Session across three campuses in Beijing and HangzhouMore Beihang NewsBeihang University holds graduation gala for Class of 2026More
Beihang NewsBeihang University holds graduation gala for Class of 2026More Beihang NewsMETU President Ahmet Yozgatlıgil visits Beihang UniversityMore
Beihang NewsMETU President Ahmet Yozgatlıgil visits Beihang UniversityMore Beihang NewsUniversity leaders take group photos with 2026 graduatesMore
Beihang NewsUniversity leaders take group photos with 2026 graduatesMore Beihang NewsTrio Hélios Piano Concert staged at BeihangMore
Beihang NewsTrio Hélios Piano Concert staged at BeihangMore